ME 184 Robotic Car
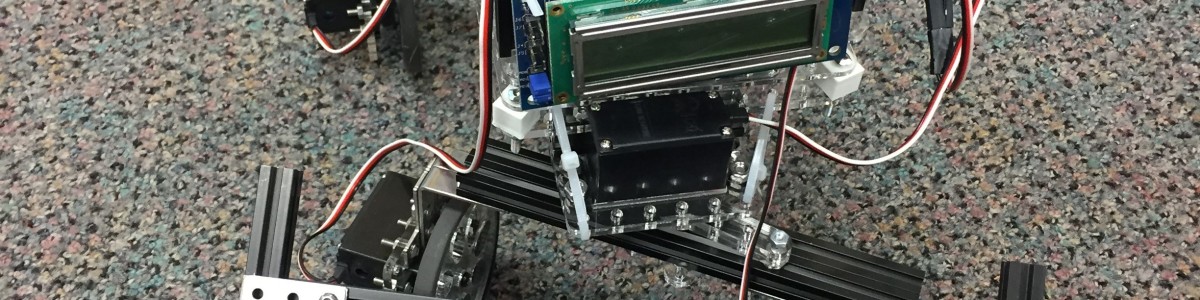
Robotic Car controlled with steering wheel. MyRio's were used for car and wheel. The wheel position is found by using the MyRio accelerometer and PWM values for continuous servos are sent using shared variables to the car's onboard MyRio.
Link to LabView code: https://www.dropbox.com/s/gknlmi1pi8r21fi/Car%20Robot.zip?dl=0