ME184 Robotic Car
For this project we used two myRIO's to construct a steering wheel that controls a car. For the steering wheel we utilized the accelerometer to obtain positional data which was then send to our car through shared variables. The car read the steering wheel data int he form of duty cycles. For example, as we moved the steering wheel forward the car moved forward, as we moved the steering wheel backwards the car moved backwards, and as we moved it side to side the motors rotated in opposite directions.
Code can be viewed here: https://drive.google.com/open?id=0B51bIAYzaKGIQy1ldlJwMC1GV0U
Initial Testing of Steering Wheel:
Car Moving:

Car Racing:
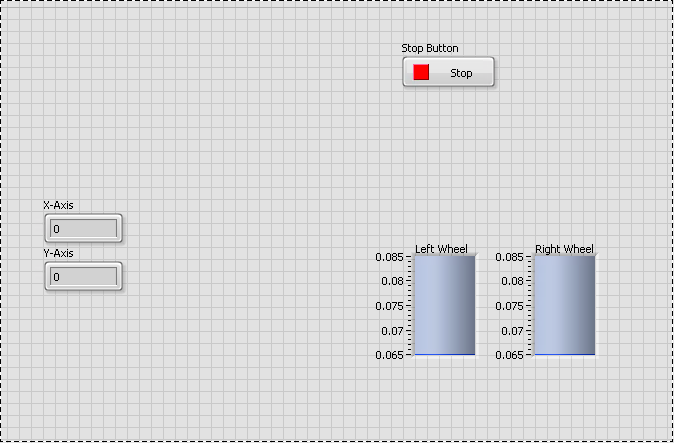
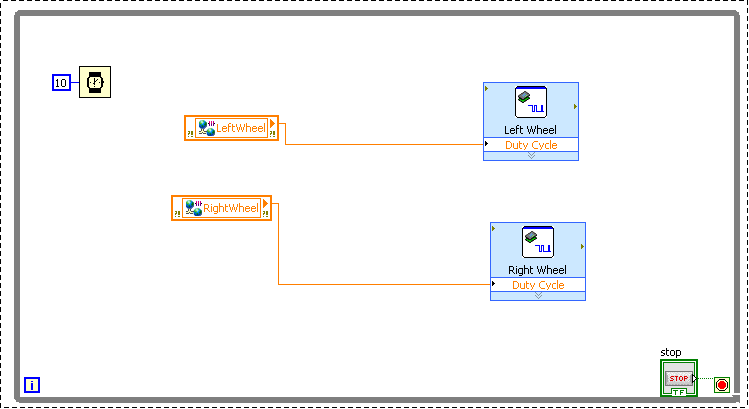
Steering Wheel User interface and Code
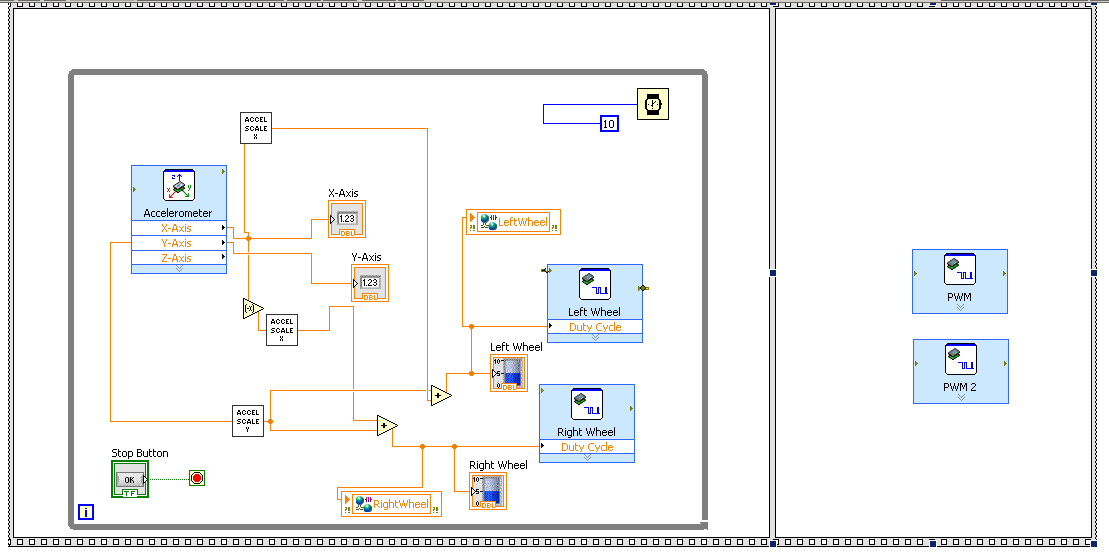
Car Interface, shared variables used to read steering wheel data