Remote-controlled Robotic Car
For this project, my team and I created a myRio-powered car that could be controlled by a tilt-sensing remote. The remote contained a second myRio, which has an accelerometer inside of it that can sense which direction the Rio is being tilted in. This allowed us to write a program that would spin the car's wheels forward when the 'steering wheel' was being tilted forward, spin the wheels backwards when the steering wheel was tilted backwards, and turn the car to the left and right when the steering wheel was tilted. The steering wheel we used, consisting of the Rio and battery fastened to a laser-cut wheel-shaped piece, is pictured below.

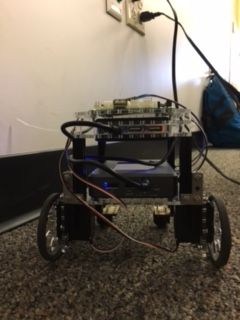
To turn the car, we had one wheel spin while the other remained stationary, so we could more accurately project which direction we wanted to drive the car in. The following link to my Google drive contains a video of the car in action, as well as all my LabVIEW code for the project. Pictures showing the side and front views of the car are pictured below.