Distributed EV3
The Problem
Using wires for communication and power imposes several constraints on users. Wires need to be hooked up correctly and can get in the way of the motions you want your robot to execute. Also, the centralized brick provides several limitations, as sensors and motors must be within a cord's length of the brick in order to be functional, as well as in the number of the components that can be used at a time.
Our Solution
The Distributed EV3 system would consist mostly of classic LEGO bricks, with several of the bricks containing processors inside. These processors would communicate to a common server (most likely a laptop) using WiFi, eliminating the need for wires and a brick. These processors would be able to run sensors and motors, allowing the user more flexibility in designing robotic projects. This model also allows the user to make projects where the components do not need to maintain any proximity amongst each other. This change allows the user to explore possibilities that were not feasible before. For example, one can have an alarm in one's room triggered by a sensor at the door, or one can measure the temperature at home while at work.
Technical
The prototype built hosts the server on a laptop written in LabVIEW. The server is always waiting for new actuators or sensors to connect, and when they do, they are assigned a unique connection while the program is running. After this point all components act like the currents sensors and motors do in the EV3, with the only difference being communication follows TCP/IP protocol instead of serial. Intelligence is centralized on the server, but there is capacity of spreading it out throughout the all LEGO bricks.

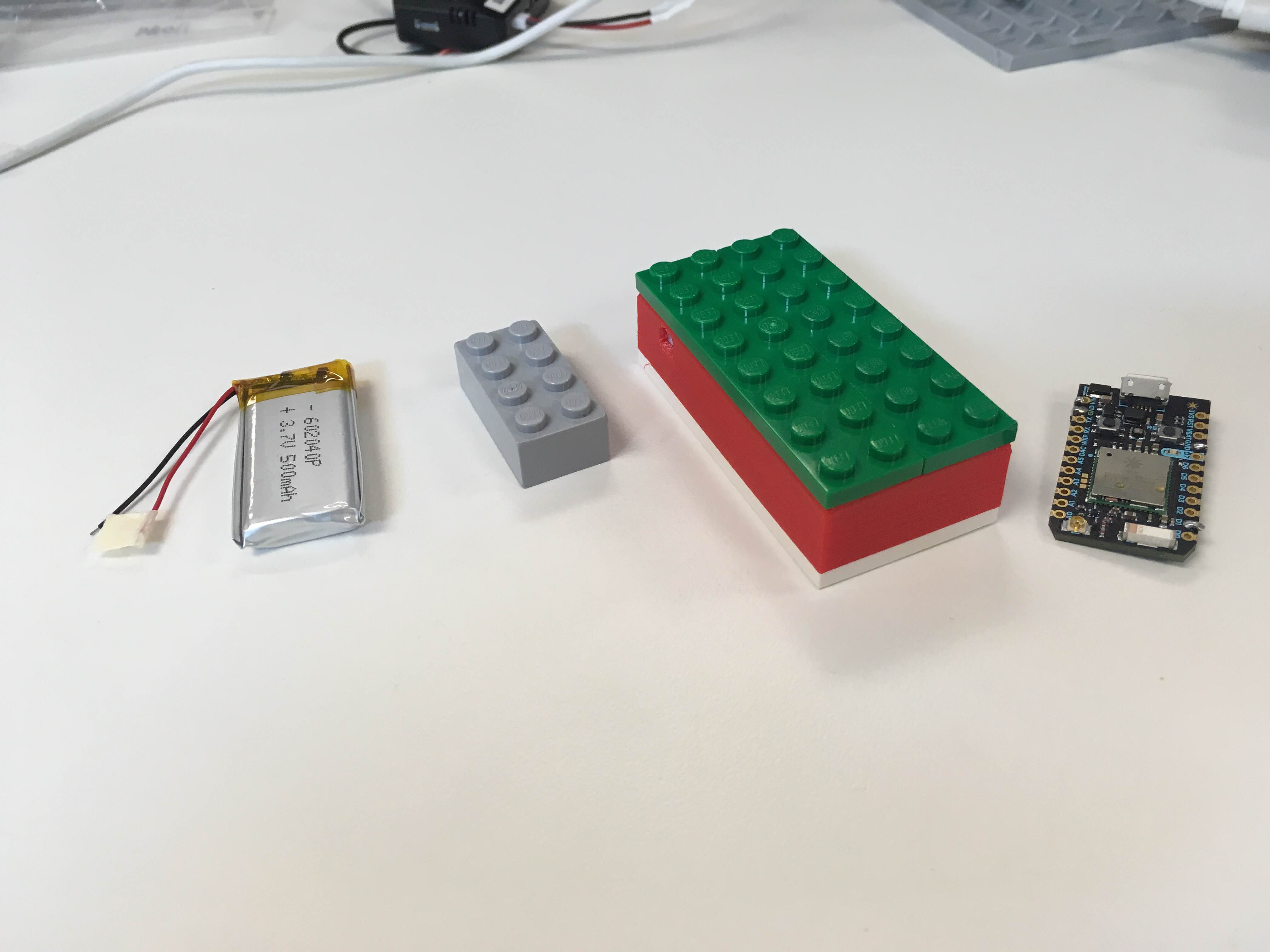
The LEGO brick is double the size of a normal 2x4 brick (4x8). It contains a small processor, a battery, a charging port, an on-off switch as well as either a sensor or an actuator. Space within a brick is very limited as the aforementioned components along with wiring must be fitted inside the brick. Large scale production of such LEGO bricks would minimize the size of all components, allowing either the use of many sensors within a brick or making the bricks smaller. The prototype model contains bricks that sense light, sound and touch ans a brick with a buzzer.